Experiential Learning

Real-world research opportunities outside the classroom.
Interested in an experiential opportunity?
Contact Monica Jones, UMTRI Associate Research Scientist.

Multidisciplinary Design Program (MDP)
The program is open to undergraduate and graduate students who earn academic credit for being on a team. About 25% of participants are from non-engineering disciplines. Students apply what they learn in class to engineering design challenges, gain technical and professional skills necessary to succeed in engineering research or industrial settings, and experience how multiple disciplines collaborate within a team. Two teams are led by UTMRI faculty.
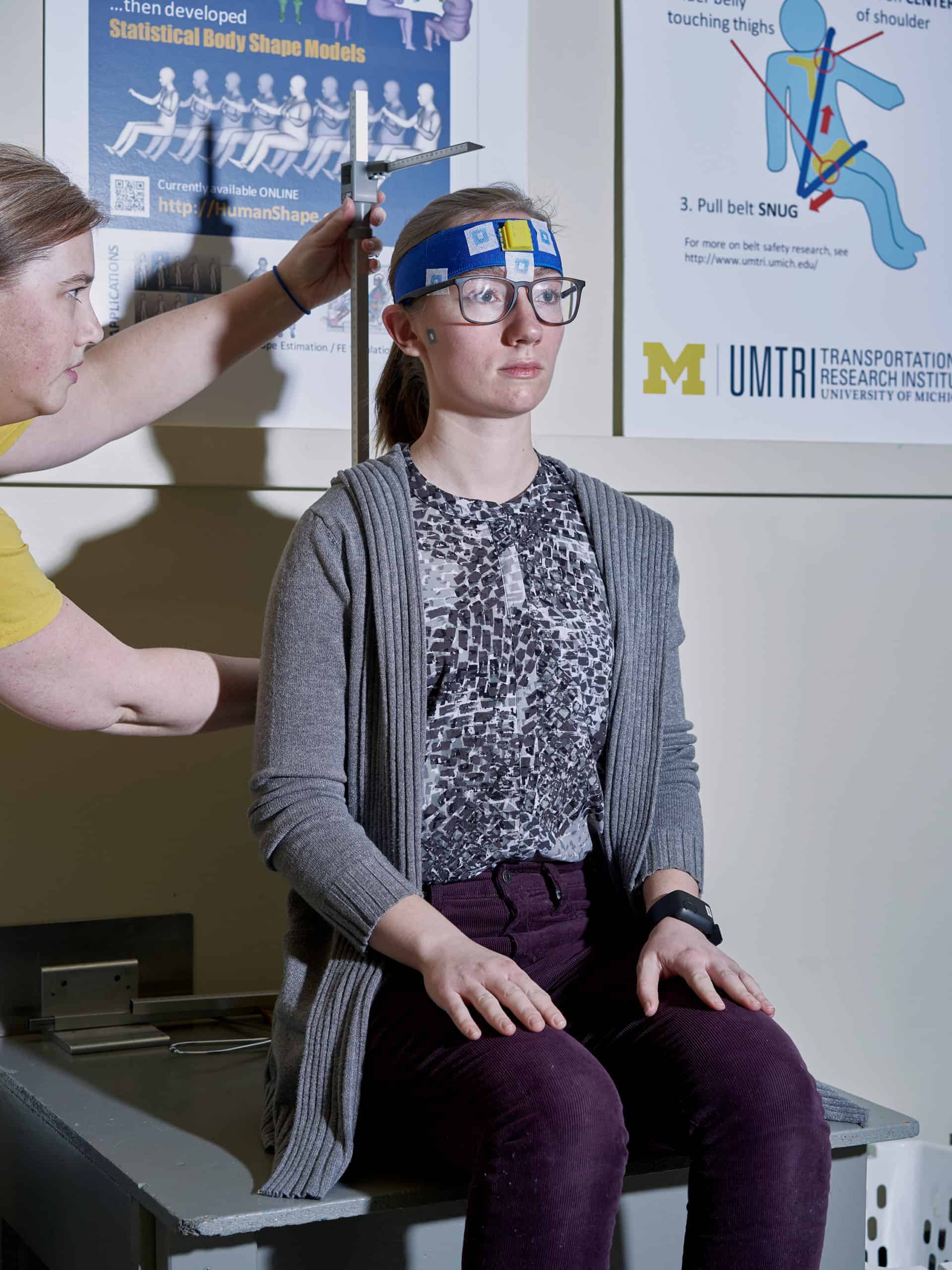
Led by Jingwen Hu and Monica Jones
Adaptive Designs for Human Safety
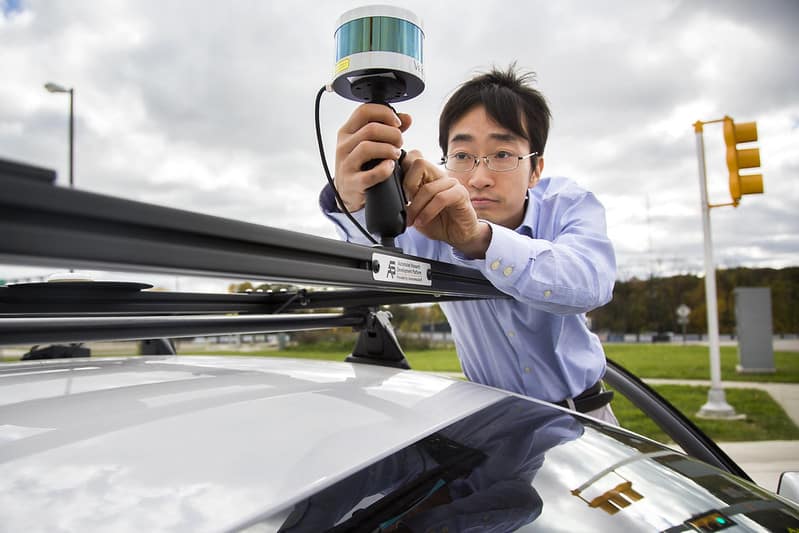
Led by Paul Green
Real-time Driving Experience Simulator
About MDP

Undergraduate Research Opportunity Program (UROP)
Undergraduate researchers (mostly first-year students) work 6-10 hours per week during the academic year under the supervision of a faculty member. Students can earn credit or be paid by the UROP program. Faculty members post available research projects each summer, and students apply to work on projects each September.
About UROP
Student Research Assistants
Many research projects have funding to provide paid research experience for undergraduate and graduate student researchers. Undergraduates usually work 5-10 hours and graduate students work up to 20 hours per week during the academic year. Students work 20-40 hours per week in the summer. Work-study students are eligible, but work-study is not required.
During the summer, UMTRI holds a Summer Student Seminar series where students can learn more about transportation safety research through weekly lectures offered by UMTRI faculty and staff.
Postings for Available Positions
Pairing Students and Startups
A year-long training, mentoring, hands-on experience for undergraduate or graduate students. The Perot Jain TechLab series offers opportunities in autonomous vehicles, electrification, and air & space.
ABOUT TECHLAB

Independent Research
Students can perform research at UMTRI for credit at either the undergraduate or graduate level.
Contact Monica Jones
Postdoctoral Researchers
Some research projects have funding available to support recent graduates who have completed their doctoral degrees.
Available Postdocs

M-STEM Academy Summer Research Program
The University of Michigan’s M-STEM Academy is designed to increase, strengthen, and diversify the number of students choosing to pursue degrees in science, technology, engineering, and math. M-STEM undergraduate students are eligible for paid research internships funded by the Academy.
About M-STEM

Summer Undergraduate Research Experience (SURE)
The SURE program offers paid summer internships to sophomore or junior undergraduate students to assess their interest and potential to pursue research in graduate school.
UMTRI 2025 SURE RESEARCH PROJECTS
About the SURE Program

Community College Summer Fellowship Program (CCSFP)
The Undergraduate Research Opportunity Program also sponsors the CCSFP, a 10-week paid internship for sophomores and juniors currently enrolled in community colleges who are interested in transferring to U-M.
About CCSFP

Visiting Scholars and Graduate Students
Researchers with academic appointments at other universities can spend a year working with UMTRI researchers. Funding is provided by the guest institution. Opportunities are also available for visiting PhD students.